![Unsupervised Monocular Depth Estimation with Left-Right Consistency[CVPR 17]](/blog/assets/img/4143FSD.png)
Unsupervised Monocular Depth Estimation with Left-Right Consistency[CVPR 17]
2017, Dec 04
One Line Summary
Existing approaches treat depth prediction as a supervised regression problem and as a result, require vast quantities of corresponding ground truth depth data for training. This paper replaces the use of explicit depth data during training with easier-to-obtain binocular stereo footage.
Motivation
Just recording quality depth data in a range of environments is a challenging problem. A novel training objective that enables our convolutional neural network to learn to perform single image depth estimation, despite the absence of ground truth depth data
Detailed Summary
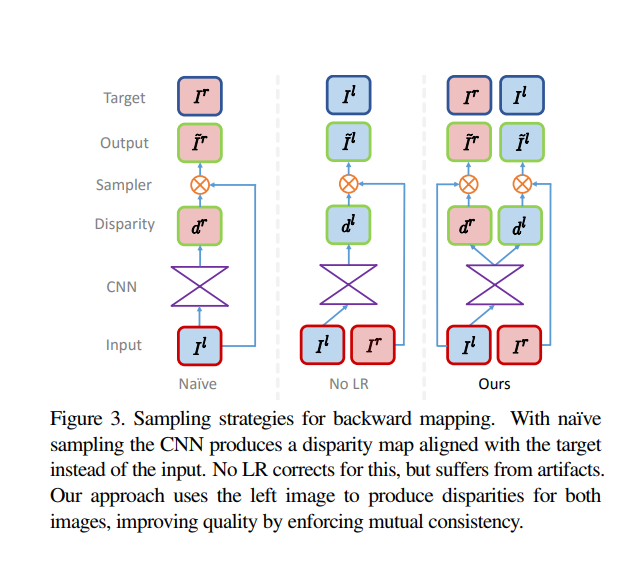
- Exploiting epipolar geometry constraints, disparity is generated using the image reconstruction loss.
- Training loss is a weighted sum of apperance matching loss, disparity smoothness loss, left-right disparity consistency loss.
- Exploit the ease with which binocular stereo data can be captured.
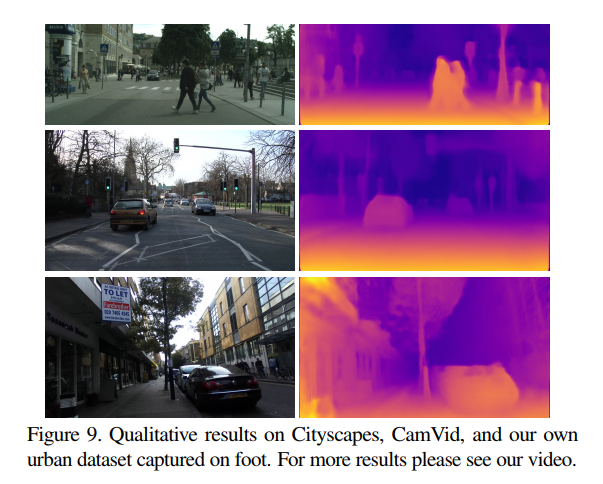
- This model can generalize to unseen datasets and still produce visually plausible depth maps
Novelty and Contributions
- L R Consistency
- Training objective that allows the network to estimate single image depth in the absence of ground truth data.
Network Details
- Network uses the hour glass type architecture .
- ResNet 50 is used as the encoder part of the network .
- Decoder part appends the predictions at each resolution for making predictions at the next higher resolution.
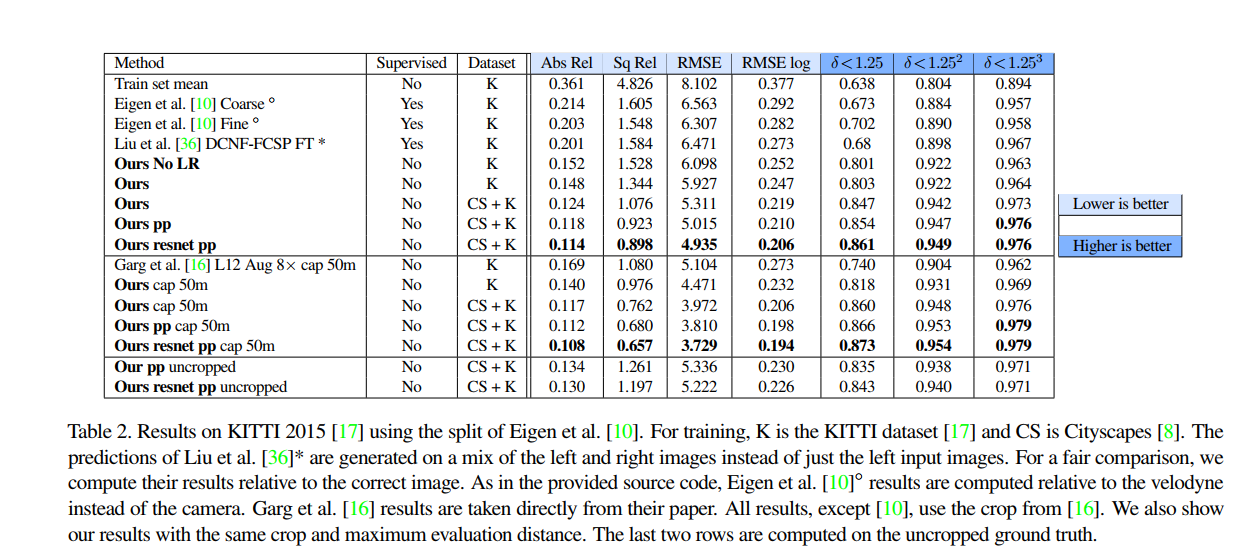
Results
Authours
Clément Godard, Oisin Mac Aodha, Gabriel J. Brostow